Metaformalism
For several years I have been compiling notes on a philosophical framework centered on the idea that the parameters that define the limits of any reality constitute the resolution at which that reality is contextualized. The object is to formalize a highly generalizable scaffold from which connections between seemingly unrelated phenomena can be investigated by modulating of the resolution with which they are observed.
The idea is to create a system with limitless versatility that can be used to describe relationships between any two or more objects or phenomena, e.g., an interaction between an enzyme and its substrate, the effect of a gene mutation on a phenotype, the way someone from the midwestern United States interprets the behavior of someone from Afghanistan, they way applesauce tastes to a baby, conversations on social media, foreign policy, intramarital communication, perturbations of the Higgs field, and so on. I began the process of organizing my notes and developing them into a cohesive framework in 2014 in the hopes of developing it into an investigative or hypothesis-generating tool, posting here in real time as I progressed, and inviting visitors to my site to comment on the discussion page.
Unfortunately, as with my creative writing, I have not had the bandwidth to continue with this project since beginning my MD-PhD studies. I do, however, plan to return to this project eventually, and still value readers’ thoughts, criticisms, arguments, and comments left on the discussion page; I will still respond to anyone who cares to engage on the subject. When I do return to this project, I’ll likely use Tumblr and Twitter handle the updates and discussion.
Enjoy!
1.0 Polyreality
Let us set as an immediate goal a formal way of discussing "things", what they "do," and the resulting implications. This will necessitate the evolution of a well-defined dedicated language. However, evolving such a language gives rise to two significant problems: first, as we set out to generate our definitions the only tool we have available is a non-dedicated language, and second, the use of language (let alone the choice of which language) imposes limitations of what phenomena can be investigated-i.e., investigations are limited to that which can be described and explained using language.
Addressing these problems in reverse order, let us allow the argument that language is the fundamental structure of conscious human thought. Therefore, whatever tools might be employed to investigate phenomena, in order for the results of the investigation to be meaningful to a human audience, the results must be language-encodable. So let us for now take the position that using language as an investigative tool ensures that the results meet the language-encodability criteria for meaningfulness. We will revisit this problem later once we've populated our investigative toolbox, but we must start somewhere, so we will concede the immediate necessity of language.
The second problem requires that the vocabulary-building process be somewhat circular: using intuitive place-holder names for some concepts that will be used to derive other concepts, which will later be employed to give concrete form to the concepts for which the place-holder names were used. For example given three sequentially interdependent concepts A, B, and C, one can say "A depends on B, which depends on C, which depends on A" or "B depends on C, which depends on A, which depends on B," or "C depends on A, which depends on B, which depends on C." However it's phrased one must, as before, start somewhere. Therefore certain concessions in vocabulary will need to be made as we set out to accomplish this immediate goal.
To mitigate this issue, we will begin with ideas that are most easily handled with non-dedicated language, and proceed in a building-up manner following a sequence that, as much as possible, minimizes the circularity. Furthermore, we will use symbolic statements to supplement those written in words. New vocabulary as it is introduced will be given in italics unless it is being assigned a symbol, in which case it will be given in boldface followed by the symbol in parentheses. Note that, analogous to evolving the lexical language, the evolution of the symbolic language requires some preexisting symbology to build upon. Here we employ an amalgam of common symbols taken from logic and mathematics.
Let us start by discussing "things" and "events".
1.1 All events constitute change at a particular time and location.
1.1.1 An interaction (↔) is an event in which all involved parties are changed. This can be expressed symbolically for an interaction at time t, involving A and B, as follows
Interactions may be either simple, or mediated.
1.1.2 Simple interactions involve simultaneous change to all parties engaged in the interaction.
1.1.3 Mediated interactions involve mediators of change between the parties engaged in the interaction, with the resulting changes to the engaged parties being non-simultaneous.
1.1.3.1 The most basal mediated interaction is observation (≺), and occurs when the observer, is acted upon by the observed. Let A be the observer, and B be the observed, such that
but not all interactions are observations, so
Note that the result of the observation is the effect on A only, and so
An important implication here is that B must exist with respect to A ( for reasons that will be addressed later, the observer-with one exceptional case-can always be assumed to exist). This can be generalized as follows:
The First Fundamental Nature of Existence: Anything that can be observed as distinct from something else, must exist; anything that exists must be observable as distinct from something else.
We can express this symbolically using a collection of events: one observation, and one non-observation. For arbitrary A, B, and C,
1.2.1 Anything that limits existence, constrains (⨀) it. Let us define a set of parameters, P, that define the limits of B as it exists with respect to A. Then P must constrain B with respect to A, which may be evolved symbolically as follows:
1.2.2 Resolution (ℝ) defines parameters that constrain observation. We may consider this the level of interpretation (LOI) at which we are evaluating an observation, such that lower level of interpretation corresponds to higher resolution. Therefore if we adopt the following notation:
we can build upon equation (8) to evolve the following symbolic relationships, at some resolution R,
The Fundamental Nature of Reality: Reality is the relationship between all forms that exist at a particular level of interpretation.
In the case a reality only includes one observer, one observed, and (if predicated upon a simple interaction) one mediator, we will refer to the reality as simple.
that is, B is real (ℜ) at resolution R, with respect to A.
An important distinction between level of interpretation and resolution is that while from equations (8), (9), and (10) we see that resolution incorporates parameters specific to the interacting elements, the level of interpretation does not and has a scalar value. Therefore we can define the relationship as follows: level of interpretation is the inverse-magnitude of resolution.
1.3 Let us make the following useful definition: anything material or intangible, whether real or abstract, that can be described, identified, said to exist or to change, or that has the potential to interact with anything else, constitutes a form. For example, in equation (6), A, B, and C, are forms.
1.3.1 Forms are defined by varying sets of lineaments: parameter-types, each of which can be quantitatively evaluated.
1.3.1.1 Collections of lineaments and their magnitudes constitute formal properties.
1.3.1.2 Forms exhibit unique sets of properties with respect to the region and resolution in which the form is resolved, called context (ℭ). Therefore, given (14), if B has a unique set of N properties, p, at resolution R, then
1.3.2 Within a given context, forms can exhibit extrinsic, intrinsic, and innate properties. Therefore if we let pextrinsic = x, pintrinsic = i , and pinnate = a , and let l be the number of extrinsic properties m be the number of intrinsic properties, and n be the number of innate properties, we can rewrite (15)
1.3.2.1 Innate properties describe a form's state. For example, when dealing with elementary particles, quantum numbers are used to determine various quantum states (spin, orbital, magnetic, angular momentum, etc.).
1.3.2.2 No two forms can exhibit all the same innate properties.
Therefore if
then
1.3.2.3 Intrinsic properties describe perimeters of materiality (e.g., density) and speak to the self of a form, while extrinsic properties are nonessential to the form's selfness but rather describe its type (e.g., size). For example, consider an iron sphere about 6.2 cm across, weighing a kilogram. Cleave the sphere in two, and the objects that result are neither spheres, nor are they (each) a kilogram. Therefore the mass and shape of the initial sphere were both extrinsic properties.
On the other hand, the density of the sphere (about 7.9 g/cm³) remains unchanged. So too is the fact that the initial and resulting objects are all electric conductors. Therefore the density and conductivity of the initial sphere are intrinsic properties. These intrinsic properties are related to the selfness of the initial sphere. Here we can say the self of the sphere is iron, because it is the ironness of the sphere that gives rise to its intrinsic properties.
To get an intuitive grip on the distinction between self and type, we can look at the semantics involved in how, in English, we discuss an object that is both spherical and iron. We might say it is an iron sphere, or a sphere of iron. The "of" labels the self of the object. Now consider a wolf pack (or a pack of wolves). Here "wolves" is labeled as the self. We can check this shortcut by plucking a member of the wolf pack out: is it still a wolf? Yes. Is it still a pack? No. Therefore, "wolf" is the self and "pack" is the type.
Note that properties can be intrinsic in one instance and extrinsic in another depending on the resolution with which a form is considered. For example, consider the method by which we might "pluck" a member from the wolf pack. Let us say the pack occupies some region A, and an object universally attractive to wolves occupies an adjacent region B that is separated from A by a tall barrier such that the wolves must jump over the barrier to pass from A to B. We can separate a single wolf by starting off with the barrier too high for any wolf to jump over it, and then reducing its height by infinitesimal increments until only the very best jumper in the pack can clear it. Then given an appropriate amount of time, we will have a pack of wolves in A and a lone wolf in B.
But what if our barrier-lowering process lacked the specificity to lower the barrier by infinitesimal increments, such that it is instead lowered by relatively large increments? This could create a situation in which the same barrier-lowering-step that enables the pack's best jumper to clear it, also allows its second, third, and fourth best jumpers to clear it as well. Now we have a pack in A and a pack in B. Because the system cannot resolve the pack into individual members, its "packness" is left intact. Therefore there exists a resolution at which "pack" constitutes a self, not a type. Because self and type embody the intrinsic and extrinsic properties respectively, it must be that the intrinsicness and extrinsicness are resolution-dependent.
1.3.2.3.1 Self and type give rise to identity. Therefore, two forms that exhibit the same extrinsic and intrinsic values are identical:
1.3.2.3.2 Identical forms are the same (⇔) form at a particular resolution iff they have the same innate values:
Note that here the names B and D are interchangeable and refer to the same form (as opposed to two different forms of equal value).
Note too, that in accordance with the Pauli exclusion principle, two innate properties that must contextualize a form are position and time. Consider two forms that share the exact same extrinsic, intrinsic, and innate properties, then from §1.3.2.2 they must be the same form at that resolution:
1.3.2.4 Two forms that exhibit the same intrinsic values are congruent (≅):
1.3.2.5 Two forms that exhibit the same extrinsic values are similar (≃):
1.3.3 The total context range in which a form can be delineated is the delineation space of that form.
Recalling (15), let S be the delineation space of BR. Then
1.3.3.1 Any form containing daughter subforms that share the same delineation space is a homoform.
1.3.3.2 Any homoform in which the daughter subforms can only resolve to the same delineation space is an obligate-homoform.
1.3.3.3 Any form containing daughter subforms resolvable to at least two distinct delineation spaces is a heteroform.
1.3.3.4 Any form that alternates between hetero- and homoformism depending on the level of interpretation at which it is resolved, is a morphoform.
Consider the case in which a particle traveling with some momentum, μ , collides with a stationary, particle. As a result of the collision the velocity of the moving particle is reduced, while at the same instant, the velocity of the stationary particle becomes nonzero. Note that mass depends on velocity by the relation
where m₁ is the mass at some velocity v, m₀ is the resting mass, and c is the speed of light in a vacuum. Note too that mass is an extrinsic property of each particle. We see that each particle is simultaneously changed by the collision event, therefore the interaction is simple.
Now consider a binary sensor (Figure 1), that registers the presence (1) or absence (0) of type-A particles. Let us say that type-A particles are those which do not absorb photons of wavelength λ. Imagine the sensor is affixed to a device that emits a coherent beam of λ light away from the sensor. In the absence of type-A particles, the sensor evaluates to 0. But when a type-A particle traverses the beam of λ light, some of the light will be reflected back toward the sensor, which will absorb the light and evaluate to 1. Therefore the sensor is extrinsically changed by having sensed the particle, but is the particle changed by having been sensed? Note that the λ photons reflected by the particle toward the sensor will impart energy to the particle, therefore the particle is indeed changed. However, the change produced in the particle and the change produced in the sensor are not simultaneous. Specifically, they occur t seconds apart, where
and d is the distance from the particle to the sensor in meters (assuming d spans a vacuum). Further, the sensor does not interact directly with the particle, but rather the interaction is facilitated by a reflected λ photon. Therefore the interaction between particle and sensor is a mediated interaction.





Note that because the photon’s velocity is changed (with respect to direction, not speed) both by contact with the particle and by absorption by the sensor, the mediated interaction between particle and sensor involves two simple interactions: a photon/particle interaction followed by a photon/sensor interaction. This must always be the case and so gives rise to the following equivalent statements:
i. X is a mediated interaction.
ii. X is concatenation of at least two simple interactions.
Here, two simple interactions each result in changes to both parties (i.e., photon and particle, photon and sensor), but the effect of the mediated interaction is defined by the change in the sensor from 0 to 1 and occurs at the instant the photon/sensor simple interaction occurs. Therefore this mediated interaction is one way: the sensor “sees” the particle¹, and so constitutes an observation interaction. Note that this does not violate (1) since by the end of the concatenated simple interactions comprising the mediated interaction, both the sensor and the particle are changed in some way.
Using (6) we can say that, from the perspective of the sensor, the particle exists. However, this perception of existence must hinge upon the sensor distinguishing between the sensed type-A particle and the absence of the particle. That is to say, if the sensor/emitter construct was adrift in a sea of type-A particles, such that it experienced continuous and perpetual evaluation to 1, the presence or absence of a particular type-A particle would not effect any change in the value of the sensor, and so the presence of this particle would be meaningless to the sensor, moreover the particle cannot be said to exist from the point of view of the sensor². If however, a λ light absorbing particle (call it a type-B particle) infiltrates the type-A particle sea and the emitter’s beam strikes it, there may exist a break in the continuity of the “Type-A particle present” signal (i.e., the sensor may temporarily evaluate to 0). Only if this event occurs does the evaluation of 1 have any meaning.
Therefore the type-A particles do not exist with respect to the sensor, until the presence of the type-B particle interferes. Until this time, the sum of the forms incorporated into the reality of the sensor are confined to the sensor and the emitter³. This means any reality involving both the sensor and the type-A particles must span a period that involves both sensor states: 1 and 0. This case is generalizable, and gives rise to the following corollary:
1.3.4 The time parameters of any reality constitute the limits of its perpetuality. That is, any event spanning a period of time incorporating all time constraints for that reality is perpetual from the perspective of all forms constrained by that reality.
1.3.5 A collection of forms which may be resolved at some higher level of resolution into a single form with new extrinsic properties, constitute subforms resolving into a parental metaform.
1.3.5.1 Any metaform comprising a collection of identical elements is a polyform.
1.3.5.2 Any metaform comprising a collection of non-identical elements is an oligoform.
1.3.5.3 All subforms have the same intrinsic properties as their parental metaform.
1.3.5.4 For any nonzero level of interpretation, all forms are metaforms comprising at least one subform.
1.3.5.4.1 Any metaform comprising only one subform in a given reality constitutes an element of that reality.
1.3.5.4.2 An element is a form at the lowest level of interpretation at which it retains its intrinsic properties.
Let e and f be two levels of interpretation, such that e < f. Then we observe
where b is a subform of B. Therefore for a given reality we can symbolically describe the elemental form of B, 𝓑, in two ways: interms of decreasing level of interpretation (i.e., increasing resolution) of the form, B, such that
or in terms of increasing level interpretation (i.e., decreasing resolution) of the subform, b, such that
1.3.5.5 The level of resolution at which an element resolves into a form is the elemental amalgam point.
1.3.5.6 The level of resolution at which a form resolves into elements is the formal fracture point.
1.3.5.7 At the zeroth level of interpretation (i.e., infinitely high resolution) all elements are resolved into fundaments. Fundaments comprise only themselves, and cannot be subdivided. Therefore if Bf is a fundament,
It follows that all forms are at some level of interpretation comprised of fundaments-though these fundaments do not exist in most realities.
1.3.5.8 All forms resolved at the lowest possible level of interpretation for a given reality are pseudo-fundaments, and are elemental with respect to that reality.
Consider some reality G, spanning levels of interpretation f through g, such that f < g. Then it must be the case that Bf is an element in reality G:
Furthermore,
which is to say be does not exist in reality G.
Consider the wolf pack in the earlier example. Let us define a reality encompassing the wolf pack (comprising eight wolves) as the observed, and a construct we will call a simple anthropic observer (SAO) as the observer. The SAO is a theoretical human-like form that can exist in any reality over any duration of time, and who has powers of interaction similar to that of a human being, but which are strictly limited to specific parameters in the case to which the SAO is applied. In this case let us say the SAO identifies wolves by shape, and wolf packs as groups of at least two wolves. Also, let us choose our wolves to be social, such that they will congregate if they are able to.
There are two mediators in this reality: light, and the barrier dividing regions A and B. Let us say the light is constant and set it aside. Before we begin lowering the barrier, the SAO observes a pack in region A. Does the SAO also observe individual wolves? No. Not before the barrier is ever lowered. This is because all the wolves are constrained to a single region (region A) and so will remain as a single pack which our SAO can identify (remember, the SAO’s powers of observation are strictly limited). Until the barrier is lowered and wolves separate out there is no context for viewing individual wolves as separate entities. And so the pack is an element of the reality, while the comprised wolves are an intrinsic property of that element-in the same way iron was identified as an element by alchemical researchers in the first millennium BCE, while individual atoms of iron were not perceived (and so did not factor into their reality).
Lowering the barrier slowly by high-resolution micro-increments, such that only one wolf separates itself from the pack, permits the SAO to identify the wolf as its own separate entity apart form the pack. This constitutes a change in reality: now the individual wolves are elements of the reality, and the pack is a metaform. Moreover, the wolves here are pseudo-fundaments of the reality, since there exists no potential for a lower level of interpretation.
Must not all elements be pseudo-fundaments? Not necessarily. Let us now remove the universal wolf attractor from region B, such that the lone wolf re-crosses the barrier into region A, in accordance with its social tendencies. Now let us raise the barrier back to its full height and add a second SAO, call it SAO₂, and let the SAO's be able to see one another. The initial SAO, call it SAO₁, observes the pack as a metaform, while SAO₂ observes it as an element. Therefore there exist two concentric realities: the metareality with respect to SAO₁, and the subreality with respect to SAO₂. In both realities, the pack has the intrinsic property of being composed of wolf, but only in the metareality, does the pack has the extrinsic property of magnitude: i.e., it is composed of eight wolves. Because the elemental pack of the subreality is superseded by the higher resolution metareality elements (i.e., the individual wolves), the wolves constitute pseudo-fundaments of the metareality.
Replacing the attractor in region B and lowering the barrier by large increments yields a low resolution of the pack, permitting instantaneous separation of the eight-wolf pack into two four-wolf packs. Now SAO₂ sees two subforms, are they identical? Extrinsically they are both of magnitude four, and intrinsically they are both composed of wolf; therefore, yes, they are identical in the SAO₂ subreality. Are they the same? For them to be the same, they would need to not only be identical, but have equivalent innate properties.
What innate properties are built into to the SAO₂ reality? By the Second Corollary of Reality time must give innate context to all forms. So too must position, as we have built positional space into the framework. Since the four wolves in region B cannot occupy the same positions as the four wolves in region A at the same time, the two identical packs are not the same pack. Note, however, that the four-wolf pack in region A observed in the SAO₂ subreality is indeed the same pack as the four-wolf pack in region A of the SAO₁ subreality.
How might concentric realities manifest in the context of human experience? Consider the case of an individual exhibiting flu-like symptoms with coughing in modern western society. In the metareality (call it M₂) encompassing the realities of all people observing the invalid, the observers will be motivated to patterns of behavior predicated on the existence of virus pathogens which exist at a fairly low level of interpretation. That is, we can expect these patterns of behavior to include avoidance, washing of hands, offering medication, and so on. Now let us consider the same sick individual but at an earlier time, say the fifteenth century. Now a metareality results (call it M₁) comprising the realities of observers who are not aware of the existence of microscopic pathogens. Because reality is defined by observations, and observations are defined by the affects on the observers, M₁ is intrinsically different from M₂. Namely, viruses do not exist in M₁, and neither do responses involving what modern western observers would consider adequate precautionary measures on the part of the observers.
Of course, the fact that viruses do not exist in M₁ does not imply they do not exist at all. They exist and are in fact ubiquitous during the period associated with M₁ (recall that by the Second Corollary, realties are time-constrained), but at a lower level of interpretation than is available to the M₁ observers-i.e., they are abstract. The effects of the existence of viruses can be detected in M₁ as susceptible observers become infected and present symptoms. However these events will be attributed to factors that exist in M₁, such as "an act of God," or an accumulation of "bad humors," not viral pathogens. This gives rise to the following observation:
Third Corollary of Reality: Any reality involving n observers, contains at least n subrealities.
Note that all realities are, by definition, formal.
Note too that the actual infection events themselves within the M₁ observers involve sub-observers (cells, proteins, etc.) involved in countless interactions at the bimolecular scale resulting in countless infrarealities-that is, realities occuring at a lower level of interpretation than some reality (an ultrareality) with which they interact. The forms existing in infrarealities must therefore be abstract (𝔄) with respect to the ultrareality with which they affect; that is, they do not exist in the ultrareality, but can contribute to change in the observers defining that reality (for example, the mediators in mediated interactions are frequently abstract).
To formalize our understanding of abstract forms, let us consider the following collection of events:
that is, A observes B but not C at resolution u, but interacts with C at resolution v-where u and v are related
(note that j and k are interaction-specific perameters). We then observe
that is, B exists and is real at resolution u while C does not exist but is abstract. Viewed this way it is evident that u establishes a basis for reality that is ultra to the one established by v.
It is useful to identify a reality spanning the levels of interpretation available to human beings in terms of what can be existentially observed: common human reality (CHR). Further, we can define a total human reality (THR) that comprises all human reality spanning CHR plus all that which is comprehended by human beings. To discern between the two one might say "If you don't need a microscope to see it, it exists in CHR. If it occurs to you to use a microscope to see it, it exists in THR." Note that all forms existing in THR but not CHR are abstract in CHR.
Let us consider a reality at a stellar level of interpretation involving the sun and the earth. Does the Earth observe the Sun? The presence of the Sun heats the daytime hemisphere of the Earth, while the opposite hemisphere (presented with the absence of the Sun) cools; changes in solar emissions effect changes in the Earth's geomagnetic field; and the Earth is accelerated along an elliptical trajectory by the gravitational field of the Sun. Therefore the Sun causes changes to the Earth over time, and so the Earth observes the sun. Are these Sun ↔ Earth interactions simple or mediated? The change of temperature on the daytime side of the Earth is mediated by solar radiation, while changes in the geomagnetic field are mediated by the fermions comprising the solar wind. As of the writing of this section, current literature in elementary particle physics proposes that gravitational interactions are mediated by massless, spin-2 elementary particles called gravitons-though the existence of these particles in total human reality has yet to be proven.
If gravitons do exist (in any reality), then the gravitational interactions between the Sun and Earth are mediated. If not, must the reaction be simple? Consider the timeline of the interaction. Massless theoretical particles (and their corresponding forces) travel at the speed of light. But while the speed of light might correspond to the de facto speed of simultaneity in common human reality, any event generating a gravitational field is not truly simultaneous with the effect of the field on a body some distance away. Therefore from §1.1.3 we observe that the gravitational interaction must be mediated. That we can consider the gravitational forces to be formal (independent of whether the graviton is proved to exist) can be generalized to encompass all forces:
1.3.6 All forces are forms that mediate interactions between other forms.
But consider an asteroid that collides with the Earth causing an explosion that fills the atmosphere with dense particulate for several years reducing the Sun's ability to warm the daylight side of the Earth. In strict consideration of the Earth/Sun reality the asteroid does not exist (at a high LOI), and yet it is capable of interacting with the Earth in such a way that the Earth/Sun reality is changed. Therefore the asteroid is abstract to that reality.
Now let us consider three human beings on the earth's surface. Each of these people have had unique experiences, and so if they were to witness the same incident, they would be affected differently. This is to say if they saw an act of violence, one might see it as a random act, another an act of racial bias, and the third a defensible act. But how can these differences in impression be evaluated quantitatively in terms of changes to the observers? To better comprehend this we must examine what happens when a human being visually observes something on a level of interpretation lower than CHR-i.e., we must examine the involved biochemical infrarealities. Human beings observe experiences via one or more of five sensory pathways: visual, auditory, olfactory, tactile, and gustatory. Consider just the visual pathway: a mediator in the form of visible wavelength light stimulates photoreceptors in the retina of the eyes, which stimulate the parvo and magno cells of the optical nerve, which transmit electrochemical signals along their axons to the primary visual cortex. Here the signals are parsed, and a complex network of signal pathways of the extrastriate regions of the occipital, parietal, and inferotemporal cortices are stimulated. The patterns of these stimulations over time result in changes to the signaling network as a whole, and so any unique set of visual experiences will ultimately produce a unique signaling network. It is the unique signaling network pertaining to the combined perceptual pathways of each individual that gives rise to his or her individual interpretation of any newly observed event.
Therefore any reality involving a human observation is in fact an ultrareality, comprising a myriad unique infrarealities, and so it follows that for our three human witnesses, three distinct realities exist in which the mutually observed event is contextualized. This can be extrapolated across the lives of these three human beings, and indeed be generalized to encompass all of humanity:
Principle of Anthropic Polyreality: For any reality in which individual humans resolve into elements, for each human being in a collection, there exists at least one unique ultrareality.
A natural question to ask here is whether there exists some overarching objective reality. This involves an ultimate summing of metarealities will be discussed at length later in the section on information.
Note that underpinning our definitions of reality and existence is the idea of change. Before moving on, let us note the following postulates concerning change:
1.4 All formal change is transformational, such that the following statements are equivalent concerning an arbitrary form X:
i X experiences change.
ii Xt ≠ Xt+1.
iii X observes formal interaction.
iv X is transformed by a signal.
v X is a formal system below it's fracture point.
vi X comprises at least one self-contained formal reality.
1.4.1 Any simple interaction between two forms involves a momentary coalescing of the two forms into a single parent homoform, at which point the values of elemental subform innate parameters redistribute to achieve the most favorable homoformal entropy.
Consider two marbles: one stationary and a second rolling on a collision course with the first. §1.4 indicates that at the moment of impact, the the two marbles constitute a single form, at which time (by §1.4.1) innate properties between the two marbles will redistribute. As will be discussed in the next section, two particles with nonzero velocity are more entropically favorable than one, and so some velocity (and energy) is transferred to the stationary marble on impact. Note that that velocity (the derivative of position with respect to time) and kinetic energy are both innate properties.
Since all transformations occur within innate perimeters, changes to intrinsic and extrinsic perimeters must constitute emergent properties of multitudinous transformations produced by interacting subforms at lower levels of interpretation.
1.4.1.1 Elemental subforms carrying out transformations must exist at an equal or lower level of interpretation than the initial interacting forms.
1.4.1.2 The parent homoform may either exist or be abstract.
If we consider a system to be a collection or network of interacting forms (or forms with the potential to interact), then as a corollary of §1.4, §1.4.1 and §1.4.1.2 we observe:
1.4.2 All systems are homoforms.
2.0 Information
We have described existence and reality in the context of observers, and we have briefly addressed the notion of position being an innate formal property. But position where? In relation to the observer? Where is the observer? Where, for that matter, is reality?
We will address this question by introducing nonformal constructs called spaces, and we will then go on to explore the concept of information, which underlies the purpose of formal delineation. But first we must set the context for this discussion by formalizing our understanding of systems.
2.1 A formal system is a homoform comprising at least two subforms with the potential for mutual involvement in a simple or mediated interaction.
2.1.1 A simple homoformal system involves at least three subforms: an obsiform (a formal observer), a signal (a formal mediator), and an exhiform (that which directs the signal to the observer).
2.1.2 A complex homoformal system comprises more than three subforms, however there must always be at least one exhiform, one signal, and one obsiform.
2.2 Any formal system that is elemental at a particular level of interpretation is a monoformal system at that LOI.
2.2.1 Any homoformal system has the potential to behave as a monoformal system.
2.3 The the result of an interaction between two forms is a signal.
2.3.1 The signal produced by any formal system may interact solely with the local obsiform (absorption), or may interact with non-local observers in a parental homoformal system (transmission).
Consider the following simple homoformal system: the Earth as exhiform, the Moon as obsiform, and gravitational force as mediator. The produced signal is the elliptical orbit of the Moon about the Earth, but is this a transmission signal, or an absorption signal? The answer lies in the reality under consideration. If this is a simple reality then there exists no potential for an external observer or ipso facto a parental metaform, and so the signal is absorbed by the system. If, however, the reality included a simple anthropic observer capable of perceiving the difference between linear and elliptical motion, the signal from the earth-gravity-moon homoform would transmit to the SAO. In this case the SAO would constitute the obsiform in a parental homoform, with the earth-gravity-moon as exhiform, and sunlight as mediator. Of course while the earth-gravity-moon signal constitutes a transmission signal as that of a daughter homoform in the SAO reality, the signal would constitute an absorption signal with respect to the parental homoform. Defining the homoform comprising all existing formal components of a given reality as the supraform of that reality, we can generalize this relationship in the following two statements:
i All supraformal signals are absorbed.
ii All simple reality signals are absorbed.
2.3.2 A formal transmission signal that is produced constantly, irrespective of time, is an intrinsic signal.
For example, consider a book resting on a table (assume it's near the Earth’s surface). We can collect a homoformal system by identifying the book as the obsiform, the table as the exhiform, and the normal force exerted on the book by the table as the mediator. Note that the transformation exerted on the book by the table is innate: the change is to the position lineament. Since the book is near the Earth’s surface it has the innate property of being accelerated “downward” by gravity. The table imposes an “upward” normal force, checking the book’s downward momentum, and so the book observes the table. If the system were left unperturbed for some period of time, an SAO capable of discerning between falling and not-falling books would receive this signal continuously over that period, therefore the signal is intrinsic.
Now consider a forensic investigator at a crime scene. The investigator is equipped with a high-intensity UV light source that is turned on. Lets collect the UV lamp, the emitted UV light, and a nearby wall into a formal system. As the investigator sweeps the lamp across the wall, the area closest to the lamp fluoresces. But when the investigator sweeps the lamp across an area of the wall in which there is trace evidence of blood, the oxidized iron in the blood quenches the fluorescence, resulting in a pattern that can be transmitted to the investigator. Since the transmission signal alternates between clean fluorescence and patterned fluorescence depending on wether the lamp is held near a section of wall featuring traces of blood, the signal is not intrinsic. Rather, we can say the signal is conditional.
2.3.3 A translational signal is the mutual interaction of systemic subforms resulting in the production of a transmission signal.
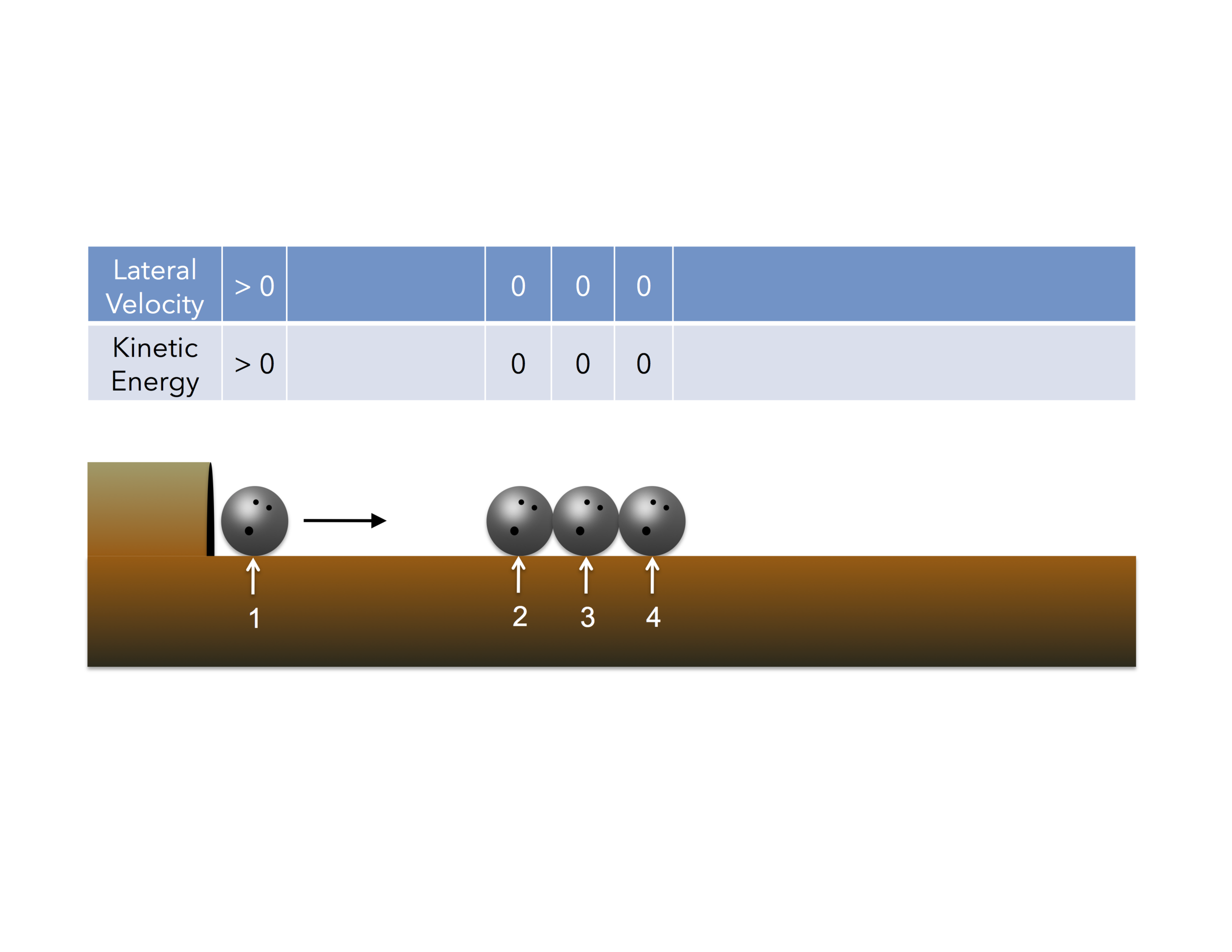
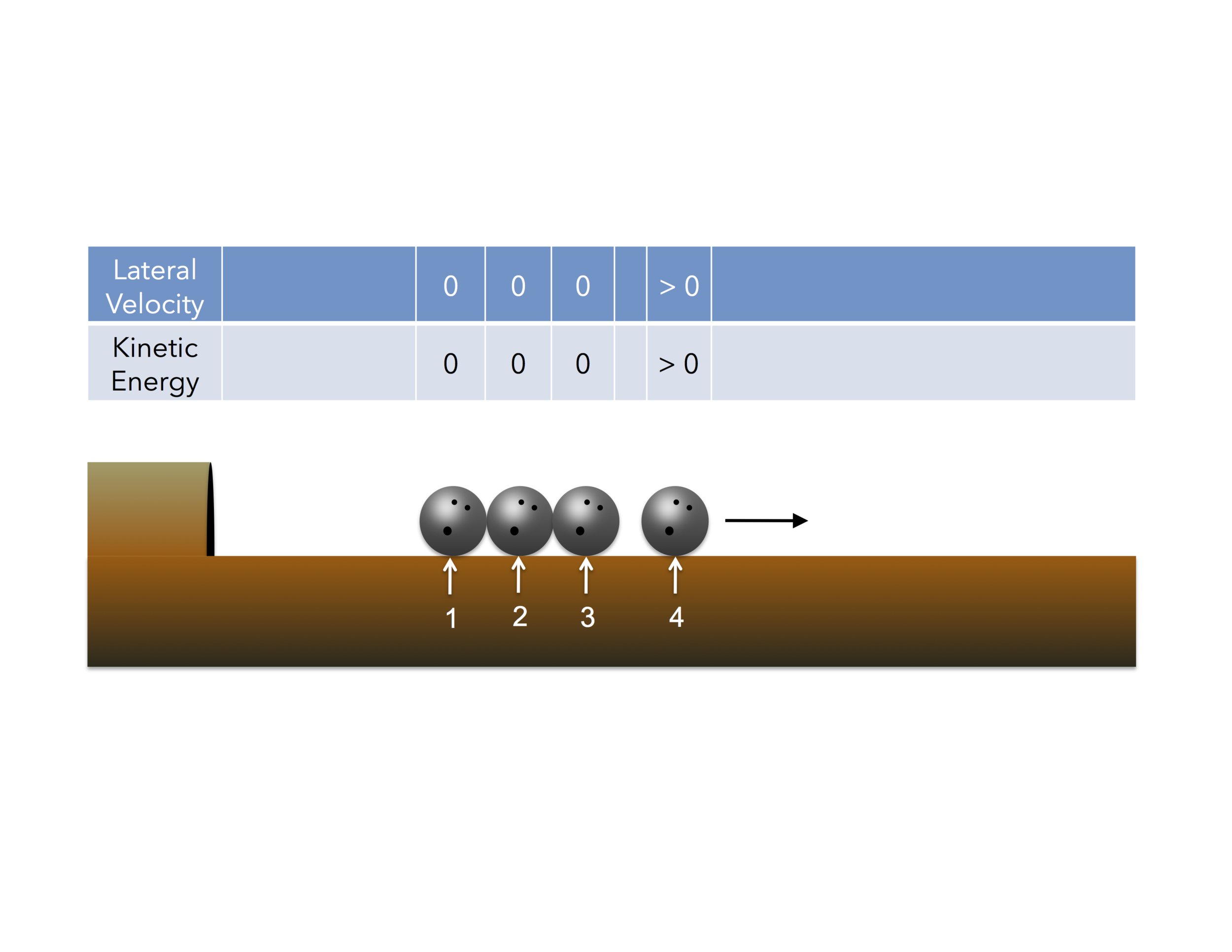
Consider a complex polyformal system⁴ comprising four bowling balls (Figure 2). Let our system be set up in the ball rack of a bowling alley such that balls 2, 3, and 4 are lined up single file and in contact with one another. Let ball 1 be traveling along the return channel of the gutter system heading toward ball 2. What are the values of the lateral velocity and kinetic energy lineaments of the four bowling balls? Initially, ball 1 has nonzero kinetic energy and lateral velocity, while balls 2, 3, and 4 have zero kinetic energy and lateral velocity. Then, at the moment balls 1 and 2 connect, the lateral velocity of all four balls is zero, but the kinetic energy has passed from ball 1 to ball 2. Therefore we identify an intratranslational signal in the form of the exchange of energy between the two balls (and the cessation of lateral motion of ball 1) produced by this simple interaction. Very rapidly⁵ however, the kinetic energy will travel to ball 3 in the form of a compression wave, constituting a second simple interaction. We can, of course combine these two simple interactions into a single mediated interaction where ball 3 observes ball 1, using ball 2 as a mediator. Likewise, as the translational signal passes to ball 4, we can view this as a mediated interaction between balls 1 and 4, where balls 2 and 3 are mediators. Now lets consider another ball, call it ball 5, in the rack five centimeters from ball 4. Note that as the intratranslational signal passes to ball 4, it will leap away from ball 3 as it acquires lateral velocity (approximately equal to the initial velocity of ball 1) as well as kinetic energy. As such ball 4 will shortly connect with ball 5, passing to it the kinetic energy resulting form the translational signal. But since ball 5 is extra-formal (i.e., not part of our signal-generating form), the signal has transformed into a transmission signal.










2.3.4 Any absorbed translational signal is intratranslational .
If in the previous example we remove ball 5 from our collection (or, alternately, we impose a time constraint on the reality under consideration, such that ball four travels without collision in perpetuity), then the signal passing through balls 1 through 4 is intratranslational. This gives rise to the following postulate:
2.3.4.1 All intratranslational signals have transmission potential.
A good question to raise here is whether signals are formal. Indeed they must be since they can be delineated from non-signal, are capable of both experiencing transformations (in the bowling ball case the signal had no materiality, but did have innate lineaments of kinetic energy and lateral velocity⁶, the latter magnitude of which changes from the speed of ball 1, to the speed of sound in a bowling ball, and then to the speed of ball 4), and are also capable of effecting transformations in another formal entity. This gives rise to an important corollary:
The Interaction Corollary of Formal Signals: Any simple interaction among components of a formal system can be viewed as a mediated interaction mediated by the intratranslational signal.
So what, then, is a simple interaction? Let us revise our definition of a simple interaction to be any mediated interaction in which the mediator cannot be resolved into a force or particle.
Another question we might ask is, what rules determine whether or not we can collect something into a particular metaform? For now we have been arbitrarily assigning inclusion or exclusion in the forms we have considered strictly for the purpose of identifying straightforward relationships. For example in the bowling ball example, we assigned balls 1 through 4 to a polyform, but set ball 5 apart so we could explore the idea of an intratranslational signal transitioning into a transmission signal. While it is important to remain flexible with respect to what we choose to collect or not collect into a homoformal system in a given situation, it is equally important to understand what we can and cannot collect. Ultimately that which determines what forms can be meaningfully collected is the space they occupy.
2.4 A space is a nonformal construct comprising the combined lineaments of a collection of potentially interacting forms.
Consider our bowling balls once more: what are some lineaments we might consider in describing them? Extrinsically each has a certain shape, mass, and overall volume. Intrinsically each is comprised of a certain material, which gives rise certain densities, melting points, etc. Note that since the balls are identical, the magnitudes of all these lineaments are the same for each ball. The magnitudes of the innate lineaments of each ball, however, are different: these include position, momentum, kinetic energy, temperature, etc. Can we include that fifth bowling ball into our original polyform? Yes, it has all the same lineaments. Can we include a plate glass window? Again, yes, plate glass windows have shape, volume, density, position, etc., therefore if included, all components of the formal system will still have the potential to interact—however the system would now be homoformal, rather than polyformal. Can we add a human being? Absolutely, there is no reason at all why a human being couldn’t interact with a collection of bowling balls. How about a humpback anglerfish? These fish only reside deep in the ocean, at depths of more than 6,500 feet below sea level, and so cannot be expected to ever come in contact with a bowling ball. Still, the answer is yes. They have the potential for interaction because of the overlap in lineaments between anglerfish and bowling balls, and as a consequence they can occupy the same space.
Can the idea of liberty be collected with our bowling balls into a formal system? No. The idea of liberty has no volume, no materiality, no discrete position, and so on. It does not share lineaments with the bowling balls, and so has no potential for interaction. It may be collected with the bowling balls into a heteroform, but not into a system. They cannot occupy the same space unless there exists some additional subform that contextualizes the lineaments of both the bowling balls and the idea of liberty. Human beings, for example, have physical properties, and conceptual properties, and therefore share lineaments with both bowling balls and ideas. Therefore the bowling balls, the idea of liberty, and a human being can co-interact (note the human can mediate interactions between the idea of liberty and the bowling balls), as such they can occupy the same space, and so can be collected into a homoformal system.
Let us now identify two important types of spaces.
2.4.1 The space corresponding to the translational signal of a homoformal signal is a reading space.
2.4.2 The space corresponding to the intratranslational signal of a formal system is a memory space.
What is significant about reading and memory spaces is that they comprises only the lineaments relevant to a particular signal. Any formal system component sharing all the lineaments of a reading space has the potential to be transformed by by the signal defining the reading space. The Standard Model provides an example of this: quarks (elementary particles that make up the protons and neutrons of atomic nuclei) and electrons both have lineaments of velocity, mass, and position⁷, but quarks do not comprise a lineament of electronic charge. In fact quarks comprise a color charge lineament instead, which electrons do not comprise. Therefore as the quarks in the protons of an atom alternate charge, expressing signals comprising a color charge lineament, the signals are not transmitted to the surrounding electron cloud because electrons cannot occupy the defined reading space. This is not to say that electrons cannot occupy a reading space with quarks, certainly they can. However the signal defining the reading space must comprise both color and electronic charge. This can be accomplished by involvement of a particle called the W⁻ boson, for example, such as in an event called beta decay. Here the formation of a W⁻ boson creates a reading space with both color charge and electronic charge lineaments, thus enabling the production of an electron (and an antineutrino).
Note that in many cases the memory space and the reading space may be the same (as in the example with the bowling balls). If, however, the lineaments of the the formal system generating the intratranslational signal are different than those of some extra-formal component of a parental metaform, the reading space and memory space will be different. For example, in the case of a human being thinking about driving a car while driving the car, we observe a reading space that incorporates the human, the thoughts, and the car, but a memory space specific to the human and the thoughts, since the thoughts do not share lineaments with the car.
2.4.3 All intratranslational signals initiate from an initiation element, or initiament, and end at a termination element, or termiment.
If the formal system under consideration is viewed at such a level of interpretation that the component subforms are elemental, then we can say the initiament is the exhiform and the obsiform is the termiment. Consider the bowling ball example once more, where the intratranslational signal initiated at ball 1, traveled through the polyformal system, and terminated at ball 4. If we set our level of interpretation such that the balls are elemental, then ball 1 is both initiament and exhiform and ball 4 is both termiment and obsiform. Recall that ball 4 transmits the signal to the extra-formal ball 5. Now let us consider the parental homoform, which includes ball 5. In this view, balls 1 - 4 are exhiform, the formal signal is mediator, and ball 5 is obsiform. This formal signal is now considered part of the intratranslation signal, and not a transmission signal, since in this context ball 5 is no longer extra-formal. And since this intratranslational signal initiates at ball 1, the initiament is no longer exhiform.
This gives rise to the following three statements:
i All exhiform monoformal systems are initiaments.
ii All monoformal systems have intrinsic signal potential.
iii All obsiform monoformal systems are termiments.
This language permits us to speak with greater specificity when discussing signal generation within a metaformal system comprising an exhiform and obsiform beneath their fracture point. Therefore rather than saying "the signal exhiform of the exhiform," we can simply refer to the initiament.
2.4.4 Given that any non-fundamental obsiform can constitute a monoformal system, we can combine the ideas of §2.4.3(ii) with The Interaction Corollary of Formal Signals to address an important point concerning the existence of observers:
The Second Fundamental Nature of Existence: Any formal observer inherently exists with respect to itself, unless it is fundamental.
Let us revisit the concept of context. We defined context in §1.3.1.2 as the unique set of properties exhibited by a formal construct, and since have discussed these properties interchangeably with the forms themselves. It is important, if not slightly counterintuitive, to understand that the context of a formal object is not the object itself. If this seems to contradict equation (15), bear in mind we have employed an equal sign (=) here, and not the symbol for sameness (⇔). This is because the form itself is more the potentiality for a set of properties, than the set of properties itself. The form comprises certain extrinsic, intrinsic, and innate lineaments, each of which in the domain of a particular reality will evaluate to a particular quantity, giving the form meaning and defining how it is observed within that reality.
But the relationship between these lineament values and the reality in which they are manifested is not fixed. For example, in a reality in which only two formal objects are observed, if both these objects comprise lineaments of size, then one is the largest thing in existence and the other is the smallest. Now let us collect another formal object into this reality: one which is 1000 times the combined size of the initial two objects. Now the object that was once the largest thing in existence is diminutive. This is the meaning of context.
And so while in the context of some reality it is reasonable to use the value of a formal object to represent it (i.e., its extrinsic, intrinsic, and innate properties), these values do not translate directly to other realities, and so cannot constitute the object itself.
An important distinction that must be made between realities and spaces are that realities incorporate only the interpretation of the context in which forms are observed with respect to observers. And so while "spacial" position might be among the lineaments evaluated by the observer(s), physical space is not per se a material component to the reality. Position, however, is part of the fabric of formal space. Therefore let us now turn our attention to the development of tools to describe this regionality of spaces.
Note that the ability of any signal to impose a transformation on an obsiform hinges upon a convergence of positions; that is, at some point the position of the signal (or some part of it), must evaluate to the same position as the obsiform. For this to occur any encompassing formal space must incorporate specific loci for each formal component of its population, and a continuum of events to enable movement of these loci. Let us now develop the lexical tools to better discuss the regional and temporal qualities of spaces.
2.4.5 A transmission moment is the time and position in the reading space where a transmission signal is generated.
2.4.5.1 An observation moment is the time and position in a reading space where a transmission signal is received by an appropriate obsiform.
2.4.5.1 The transmission cone is an enclosed region of the reading space that defines the outermost boundary of a transmission signal interaction potential at a specified time.
2.4.5.2 The transmission front is the surface of the transmission cone.
2.4.5.2.2 Transmission shadows correspond to "holes" in the transmission cone, that is reading space regions within the transmission front which are not permeated by the associated transmission signal.
It should be noted that all realities are constrained by the combined transmission fronts corresponding to the signals received by the observers defining such realities. This is to say that for two arbitrary forms A and B, if A emits a single transmission signal λ, there can be no reality with respect to B that incorporates A until λ reaches B (Figure 3).
Consider the sun in terms of CHR with respect to the Earth and everything on it. Plants observe the sun undergoing transformations in the form of photosynthesis, humans undergo transformations in the form of the activation of melanocyte pathways in their skin and visual/perceptual pathways in their eyes and brains, costal sands observe the sun by warming, etc. Now consider a massive fast-moving object traveling through the galaxy along a trajectory such that it approaches the sun from the direct opposite side of the sun as the Earth—such that the sun always blocks the earth's view of the thing (Figure 4). Let us say that this object impacts the sun at time t, causing it to release a cataclysmic burst of radiation capable of incinerating all biological material on the surface of the earth. At time t - 1 second, what is the reality with respect to a human being standing on a beach on the day side of Earth? Tanning skin, warm sand underfoot, etc., business as usual. How about at time t + 1 second? Still business as usual. Why? Because the sun is always a between 8 and 9 light minutes⁸ away from the earth. Therefore even at time t + 8 minutes, plants are still conducting photosynthesis, solar panels are still capturing radiation at consistent levels, seals are still basking comfortably, and our observer on the beach is still perceiving a pleasant sunny day. No transformations on Earth are occurring relative to the moment of the solar collision—about 150,000,000 km away at time t—because the transmission front of this event has not yet reached the Earth.
But what is the situation at time t + 9 minutes? By now the super-high energy radiation has reached the Earth such that the Earth, and everything on it, is within the transmission cone of the solar event. As a consequence, our observer and everything around him has been dramatically transformed. Note that at CHR, the observer still exists (only as a puff of ash rather than as a human being), however at the LOI of the human amalgam point the observer winks out of existence at the observation moment, and with him/her any simple reality (at that LOI) encompassing the human observer and Sun.
Now consider the massive fast-moving object: did it exist at CHR with respect to the Earth before time t + 8 minutes? No. The earth occupies a transmission shadow up until time t since the massive fast-moving object was blocked from view by the sun and so no signal from it (e.g., reflected sunlight) ever reached the earth. Does it exist with respect to the Earth at time t + 9 minutes? Yes, the object popped into existence at the observation moment of the signal produced by the collision with the Sun. Before time t + 8 minutes, did the massive fast-moving object occupy the same formal space as the Earth? Yes, the lineaments associated with the object (mass, velocity, etc.) are shared by the Earth. Before time t + 8 minutes, did the massive fast-moving object occupy the same reading space as the Earth? Yes, the lineaments associated with the signal generated by transformation of the sun at time t (temperature, energy level, etc.) are shared by the Earth.






Looking at Figure 4, we can easily see where the transmission moment of the massive fast moving object striking the sun occurs, in relation to where the observation moment occurs at the Earth’s surface. However, this leads us to a crucial question: from what point of view can these observations be made? If, for example we are close enough to observe the transmission moment at approximately time t, then we would observe the observation moment at about t + 16 min 52 sec (i.e., t + 8 min 26 sec + 8 min 26 sec), since it would take the transmission front resulting from the observation moment just as long to reach us as it took the original transmission front to reach the Earth. If we were at the surface of the Earth, of course, we would observe both the transmission moment and the observation moment simultaneously. How about if we were on a space ship nearby the Sun that could travel very close to the speed of light, say 99.999%, and began heading toward Earth at the moment the massive fast moving object hit the Sun, might we then observe the transmission moment at t and the observation moment at t + 8 min 26 sec?
Interestingly, this is not the case. According to Special Relativity, objects traveling at relativistic speeds (i.e., a substantial percentage of the speed of light) experience subjective length contraction across any distance traveled. Therefore the distance we would travel on our space ship is shorter (from our perspective) than that perceived by an observer orbiting nearby the Sun. The Lorentz transformation can be used to calculate how much shorter the distance we would travel would appear to be:

where d′ is the subjective distance aboard the space ship, d is the distance (from the perspective of those not aboard the space ship) from the Earth to the Sun at time t + 8 min 26 sec (about 151800000 km), and v is .99999 times the speed of light. This gives
And so we can calculate subjective travel time, t′, as follows
Since we would be traveling a shorter distance, we would cover it more quickly, and so we would not perceive Earth’s observation moment pertaining to the massive fast moving object striking the sun at t + 8 min 26 sec, but rather t + 2.263 seconds (equation 39). So if there’s no position from which one can observe the transmission moment at t and the observation moment at t + 8min 26 sec, can it truly be said that the observation moment occurs at t + 8min 26 sec? More generally, if there is no single reality that can contain a collection of “objective” transmission and observation moments, can an objective reality exist?
It can. But in order for it to do so we will need to sum realities.
2.4.6 The metareality that results from collecting all realities within a given space is a spatial reality.
Consider a metareality incorporating both the simple reality of the Sun + the massive fast-moving object, and the simple reality of the burst of radiation + the Earth. These collected realities include a transmission moment at time t and an observation moment at time t + 8min 26 sec, and so within this metareality these evaluations can be treated as objective. And yet, we also have, from the perspective of the earth, a transmission moment at time t + 8min 26 sec, why do we not treat this as an objective "fact."
This is due to the relative robustness of the fact that the transmission moment occurred at time t. This gives rise to the questions what is a fact? and what makes facts robust?
Consider the following: an event occurs generating transmission moment. The transmission signal travels to an obsiform, resulting in an interaction between the signal and the obsiform at the observation moment.
2.5 The transformation resulting from the signal⟷obsiform interaction is evaluated as a conclusion. The relationship of all conclusions in a collected reality with respect to a given transmission moment is a fact.
2.5.1 Two or more conclusions can be comparatively evaluated by means of mapping them to the same scale.
For example, the neural pathways associated with perception of size conclusions can be transformed to estimated-units (7 cm, 2 inches, etc.), value judgements (small, large, etc.), or even emotional evocations (intimidating, piteous, etc.).
2.5.1.1 Two conclusions are said agree when their evaluation is equal or approximately equal, with respect to the same scale.
2.5.2 Facts exhibit a measure of relative objectivity called robustness.
A fact is robust if a large proportion of the resulting conclusions in a given reality agree, and trivial if a large proportion of conclusions in a given reality do not agree.
2.5.2.1 A fact that is infinitely robust with respect to reality A, but not in metareality {A,B,...} is subjective to reality A.
2.5.2.2 A fact that is infinitely robust with respect to a spacial reality is objective.
2.5.2.3 A fact that is infinitely robust with respect to the omnireality, is universally objective.
Consider the example with the type A and B particles and the laser/sensor, and let us collect two laser/sensors and one Type-A particle into a reality, which we will call reality ℵ. let the particle intercept both emitted beams simultaneously (see Figures 5a and 5c). Do they agree with respect to the presence of the particle? The transmission front emanating form the twin λ/particle interactions will strike both sensors simultaneously, causing them to conclude 1 simultaneously, and so they agree. Let us now say the partical is moving at a rate and trajectory such that it intercepts each beam for 1 second, however it intercepts the one of the beams 0.01 seconds before the other (see Figures 5d and 5h). Is the presence of the particle robust with respect to ℵ in this case? Here the sensors will only agree for 0.98 seconds, and they will fail to agree for 0.02 seconds. Note that we can divide ℵ temporally into any arbitrary number of subrealities involving the same collection of elements. Let us do so now, and define subrealities ℵ₁ through ℵ₁₂₀ as each spanning 0.01 seconds, beginning 0.1 second before the particle intercepts the first beam. Note that we can identify 240 obsiforms here: the two sensors in ℵ₁, the two sensors in ℵ₂, and so on. Adding up the sensors that agree versus the sensors that disagree, we see that 118 pairs of sensors agree, while 2 do not. Thus we can say the in ℵ₁ through ℵ₉ and ℵ₁₁₁ through ℵ₁₂₀ the fact that the particle is absent is robust, and in ℵ₁₁ through ℵ₁₀₉ the fact that the particle is present is also robust. Therefore the momentary presence of the particle in ℵ is robust.
What if now we separate the sensor constructs such that the particle passes through their beams one at a time. Is the presence of the particle a robust fact in ℵ? Note that here the two sensors never agree on the presence of the particle, and so the fact is non-robust (though not necessarily trivial). Notwithstanding, we can indeed divide ℵ into two subrealities, corresponding to the first sensor + partifcle, and the second sensor + particle, call them ℵfirst and ℵsecond respectively. And so the fact of the presence of the particle individually robust in ℵfirst and ℵsecond, just not in the overall reality ℵ.